Wat zijn pick-and-place robots en hoe werken ze?
Mark van de Waal | 16 november 2023
Pick-and-place-toepassingen behoren tegenwoordig tot de meest geautomatiseerde toepassingen vanwege hun eenvoud en repetitieve aard. Dit betekent echter dat er enorm veel opties beschikbaar zijn voor pick-and-place-robots.
Het is belangrijk om de verschillende soorten pick-and-place robots te begrijpen om de ideale oplossing voor uw toepassing te kiezen. Aan het einde van dit artikel beschikt u over de nodige informatie om de juiste keuze te maken voor een pick-and-place robot.
Wat doen pick-and-place robots?
Eenvoudig gezegd pakken pick-and-place robots producten op en verplaatsen ze van de ene plaats naar de andere. Deze worden meestal gebruikt in toepassingen met een hoge verwerkingscapaciteit, zoals in de verpakkings-, voedingsmiddelen- en drankenindustrie.
Lees meer: Voedselproductie beter gemaakt met robotica
Types pick-and-place robots
Robots die worden gebruikt in pick-and-place-toepassingen kunnen sterk variëren. Hieronder staan enkele van de meest voorkomende.
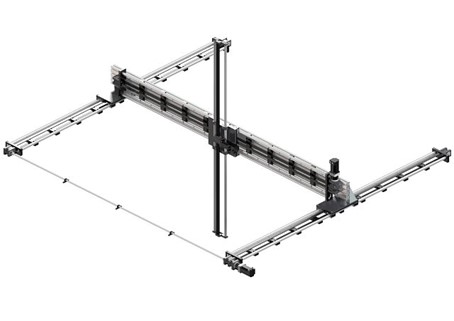
Lijnrobots
Portaalrobots zijn lineaire robots die langs drie vlakken bewegen (X, Y en Z). Ze worden gekenmerkt door een hoge positionele nauwkeurigheid en de mogelijkheid om grotere werkruimtes te bestrijken dan de meeste andere pick-and-place robots.
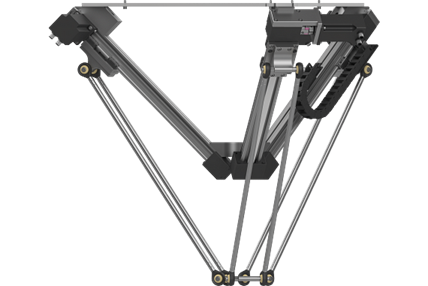
Delta Robots
Delta robots zijn parallelle robots die bestaan uit drie armen die verbonden zijn met een gemeenschappelijk gewricht boven en onder de armen. Hun grootste voordeel is snelheid, wat ten koste gaat van een lager laadvermogen dan andere pick-and-place robots.
Robot Armen
Knikarmrobots met 5 en 6 assen zijn de meest gebruikte robots vanwege hun veelzijdigheid. De bewegingsvrijheid die ze kunnen bieden, maakt ze zeer geschikt voor toepassingen die complexe bewegingen vereisen.
Collaboratieve Robots (Cobots)

Cobots zijn ontworpen om naast menselijke werknemers te werken om hen te helpen met hun efficiëntie. In pick-and-place-toepassingen betekent dit meestal AGV-stijl cobots die mensen naar picklocaties leiden via de meest optimale route, maar robotarm-stijl cobots kunnen ook gebruikt worden in een breed scala aan pick-and-place-toepassingen.
Lees meer: Wat zijn de verschillende soorten industriële robots?
Waarom je pick-and-place robots zou moeten gebruiken
Het gebruik van robots in plaats van menselijke werknemers voor pick-and-place-toepassingen biedt tal van voordelen. Deze voordelen zijn onder andere:
Productiviteit
Omdat robots vrijwel continue kunnen werken zonder pauzes en sneller dan menselijke werknemers, zijn ze inherent veel productiever. Dit betekent een hogere verwerkingscapaciteit en uiteindelijk meer winst en rendement op investering.
Betrouwbaarheid
Robots zijn niet zo vatbaar voor het maken van fouten als mensen en daarom is hun betrouwbaarheid en consistentie veel hoger. Pick-and-place robots kunnen tijdens de levensduur van de robot tot op minder dan een millimeter nauwkeurig zijn voor elke pick.

Veiligheid
In elke situatie waarin menselijke werknemers producten vervoeren, bestaat het risico op letsel. Werknemers kunnen struikelen of producten op zichzelf laten vallen, wat mogelijk ernstig letsel kan veroorzaken. Met robots is er geen risico op letsel of andere schade, waardoor ze een veel veiligere keuze zijn voor pick-and-place-toepassingen.
Rendement op investering (ROI)
Aangezien pick-and-place robots sneller en efficiënter kunnen werken dan mensen, leveren ze een sneller rendement op investering. Dus hoewel de initiële investering bij robots aanzienlijk hoger is, zijn ze op de lange termijn een zuinigere optie voor je budget. Dit geldt vooral voor het aanbod van RBTX.com, een online robotica marktplaats voor goedkope componenten en oplossingen.
Download en lees het gratis whitepaper hieronder om te leren hoe u de kosten en moeite van het implementeren van robotica kunt verlagen met de RBTX.com marktplaats!
Applicaties voor pick-and-place robots
Dankzij de flexibiliteit van pick-and-place robots kunnen ze voor tal van toepassingen worden gebruikt. Hieronder vindt u meer informatie over enkele van de meest voorkomende toepassingen.
Sorteren
Sorteertoepassingen vereisen pick-and-place robots om onderdelen te sorteren op basis van specifieke kenmerken zoals grootte, kleur of vorm.
Bakken plukken
Bij bakken plukken; pakken robots onderdelen uit een bak met behulp van een visie systeem dat de robot helpt om de kleur, grootte of vorm van een onderdeel te bepalen, zelfs als het gemengd is met een assortiment van verschillende onderdelen.
Verpakken
Pick-and-place robots kunnen producten verplaatsen naar dozen en andere containers die verpakt moeten worden in verpakkingstoepassingen. Dit kan gebeuren vanaf een aangewezen gebied of zelfs vanaf een transportband.
Inspectie
Met een geavanceerd visiesysteem kunnen pick-and-place robots objecten oppakken en visueel inspecteren, op zoek gaan naar defecten en defecte onderdelen uit de productielijn verwijderen.
Assemblage
Pick-and-place robots kunnen binnenkomende stukken van een grotere assemblage pakken en die stukken aan andere delen van de assemblage bevestigen voordat ze worden verplaatst om naar de volgende assemblagefase te worden getransporteerd.
Hoe kies je de juiste pick-and-place-robot?
Gezien de grote verscheidenheid aan pick-and-place robots is het van het grootste belang om de juiste robot voor uw toepassing te kiezen. Er zijn een paar sleutelfactoren in een toepassing die de ideale robotoplossing bepalen.
Snelheid
De vereiste verwerkingscapaciteit van een toepassing bepaalt de picksnelheid die nodig is. Delta robots zijn de snelste pick-and-place robots in termen van picks/minuut en zijn vaak de ideale keuze voor rapid pick toepassingen, ervan uitgaande dat ze aan alle andere toepassingseisen voldoen.
Flexibiliteit
Voor sommige pick-and-place-toepassingen, zoals sorteren, moeten robots onderscheid kunnen maken tussen verschillende soorten producten en ze dienovereenkomstig kunnen plaatsen. Dit niveau van flexibiliteit is beperkt tot robotarmen die zijn uitgerust met geavanceerde visiesystemen. Eenvoudige toepassingen waarbij hetzelfde product consequent van punt A naar punt B wordt verplaatst, vereisen niet hetzelfde niveau van flexibiliteit van een pick-and-place robot.
Laadvermogen
Het laadvermogen is een andere essentiële factor bij het kiezen van een pick-and-place robot; als een robot het laadvermogen van het product dat hij moet tillen niet aankan, zal hij snel verslijten en mogelijk defect raken. Het laadvermogen is ook van invloed op de snelheid waarmee picks kunnen worden gemaakt, omdat zwaardere ladingen meer tijd per pick vergen.
Herhaalbaarheid
Herhaalbaarheid – ook wel positienauwkeurigheid genoemd – is hoe nauwkeurig de bewegingen van een robot kunnen zijn. Voor toepassingen waarbij producten op zeer specifieke plaatsen moeten worden geplaatst, zoals bij assemblagetaken, is een hoge mate van herhaalbaarheid van vitaal belang.
Werkruimte
De beschikbare werkruimte voor een pick-and-place robot heeft een directe invloed op de grootte van de robot die kan worden gebruikt in een toepassing. Toepassingen met bijzonder grote ruimtes zijn bijvoorbeeld het meest geschikt voor portaalrobots of cobots.
Conclusie
Nu steeds meer bedrijven overgaan op automatisering om de productie en winst te verhogen, wordt het voor bedrijven van alle groottes steeds belangrijker om waar mogelijk automatisering te implementeren om de concurrentie bij te houden. Vooral pick-and-place robots bieden aanzienlijke voordelen ten opzichte van menselijke arbeid en zullen de komende maanden en jaren alleen maar belangrijker worden.
Bezoek onze webpagina voor meer informatie over automatiseringsproducten en -oplossingen van igus! Voor vragen over een specifiek product of een specifieke toepassing kunt u vandaag nog contact opnemen met een specialist.
En voor meer informatie over kabelrupsen en lagers kunt u onze Whitepapers bekijken op: